research
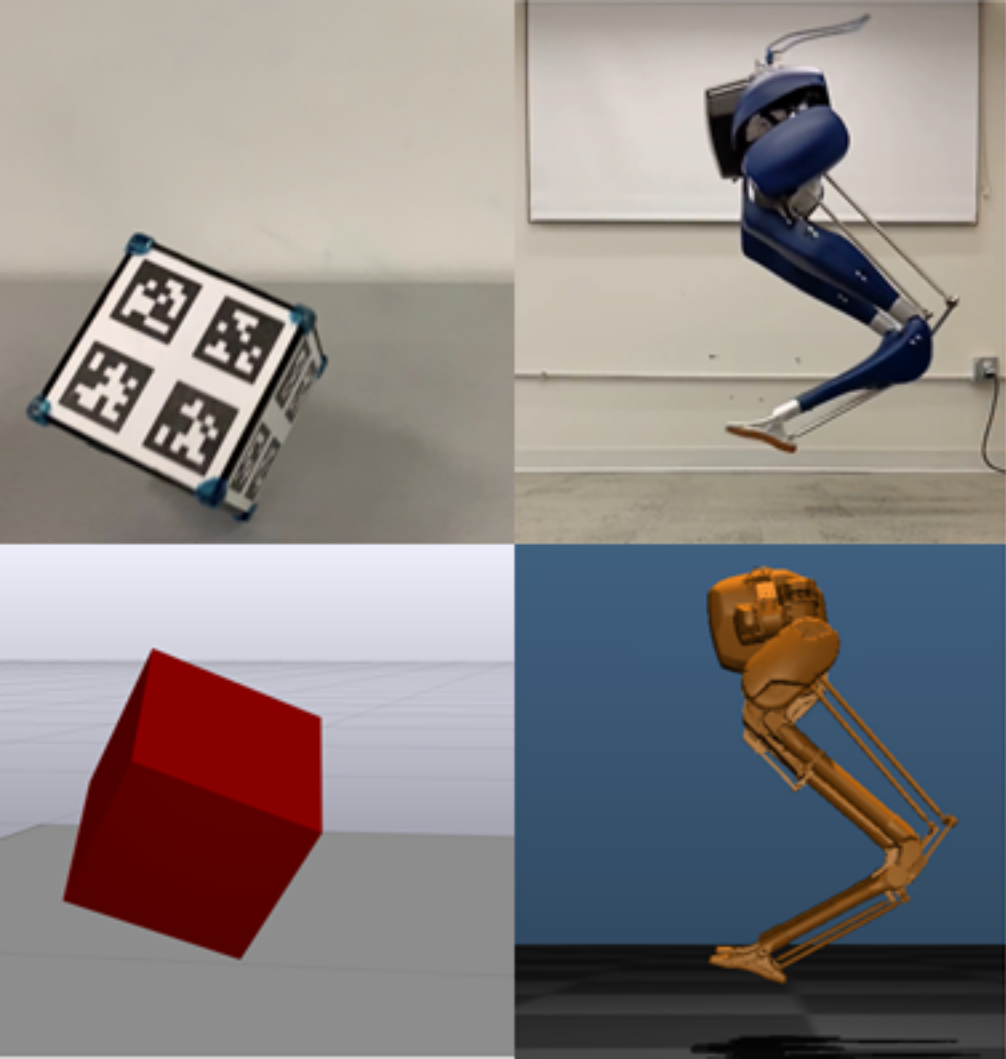
Push Anything: Single- and Multi-Object Pushing From First Sight with Contact-Implicit MPC
By Hien Bui, Yufeiyang Gao, Haoran Yang, Eric Cui, Siddhant Mody, Brian Acosta, Thomas Stephen Felix, Bibit Bianchini, and Michael Posa. Best Paper Award Finalist at IEEE International Conference on Robotics and Automation (ICRA) 2026.
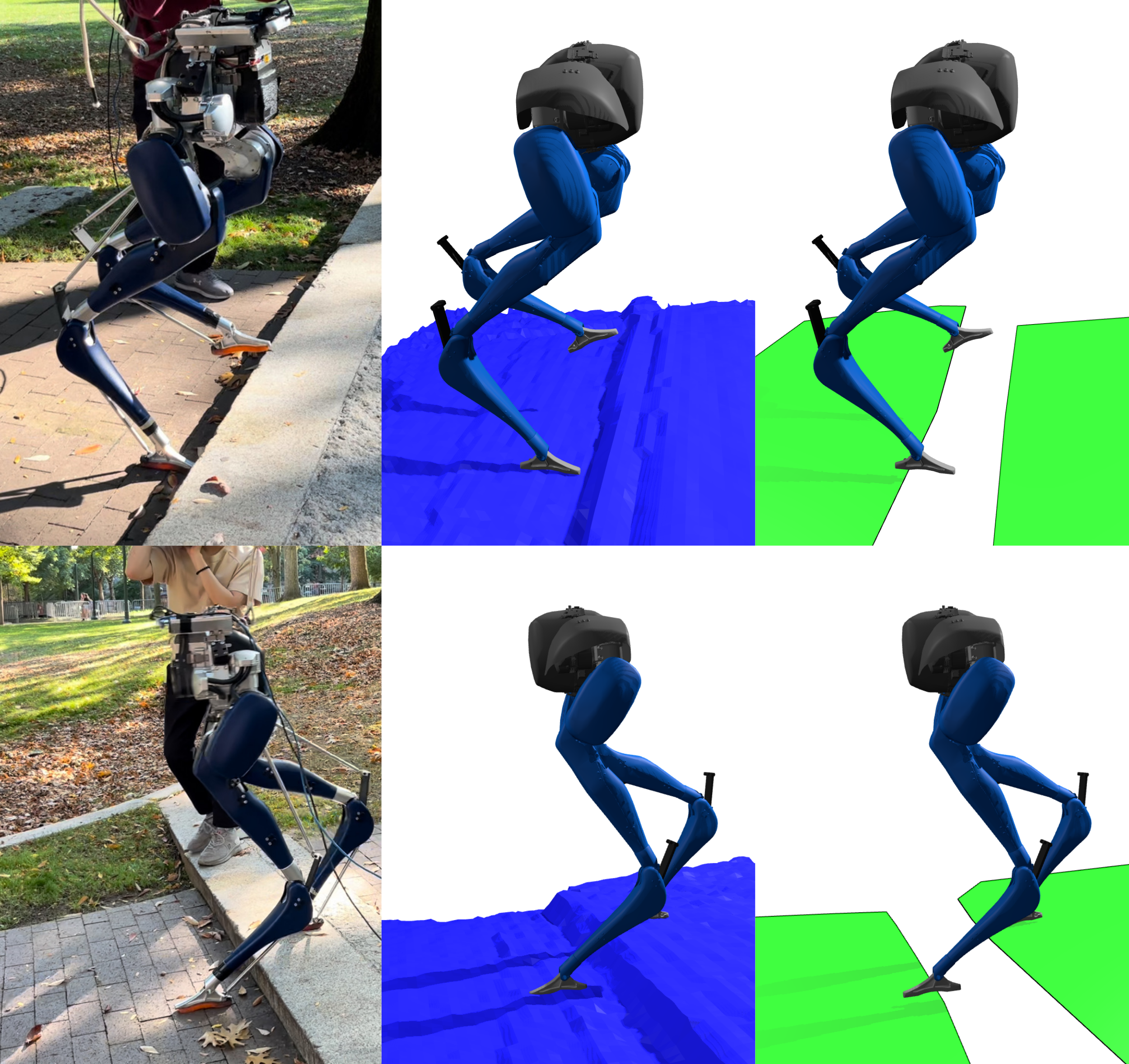
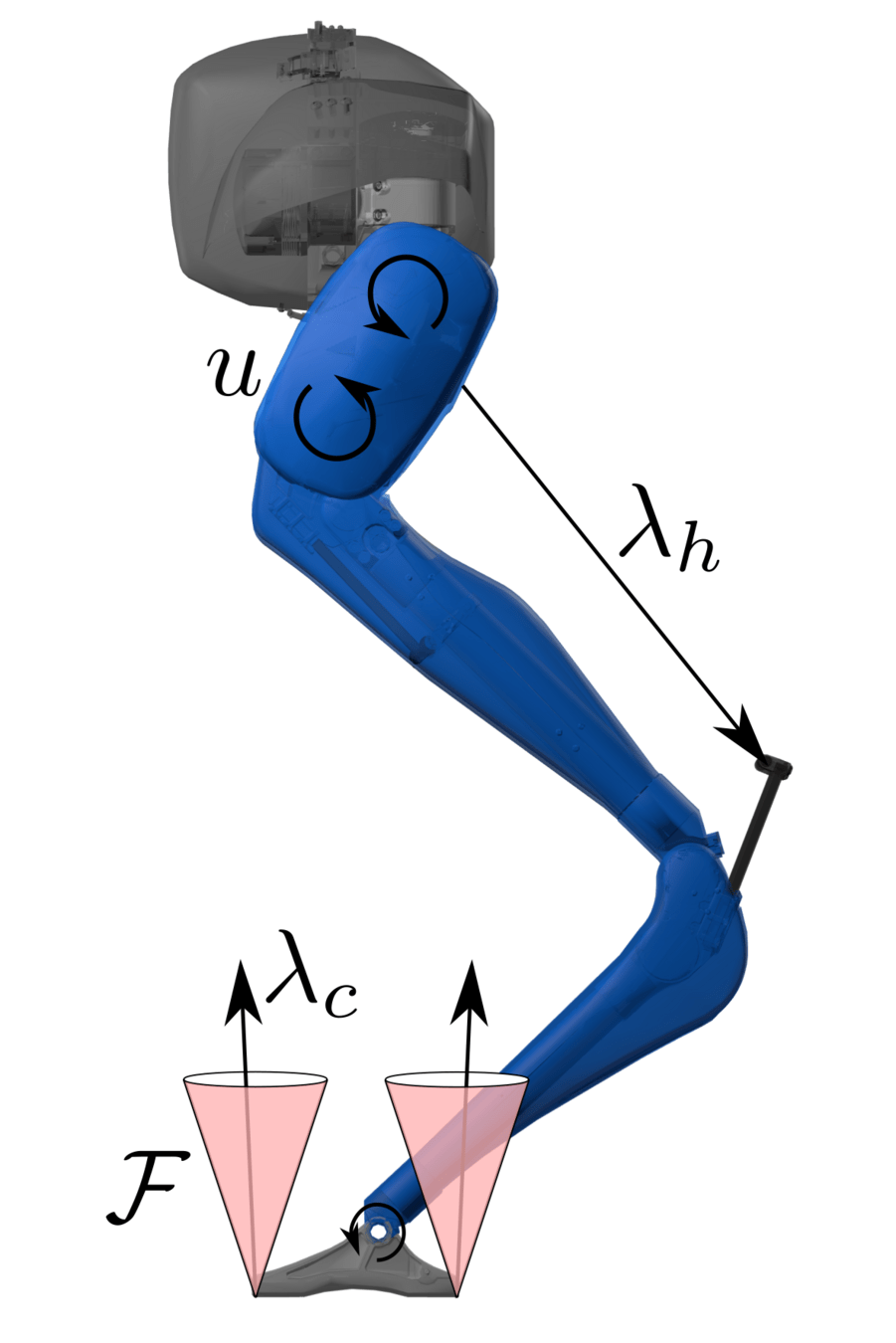
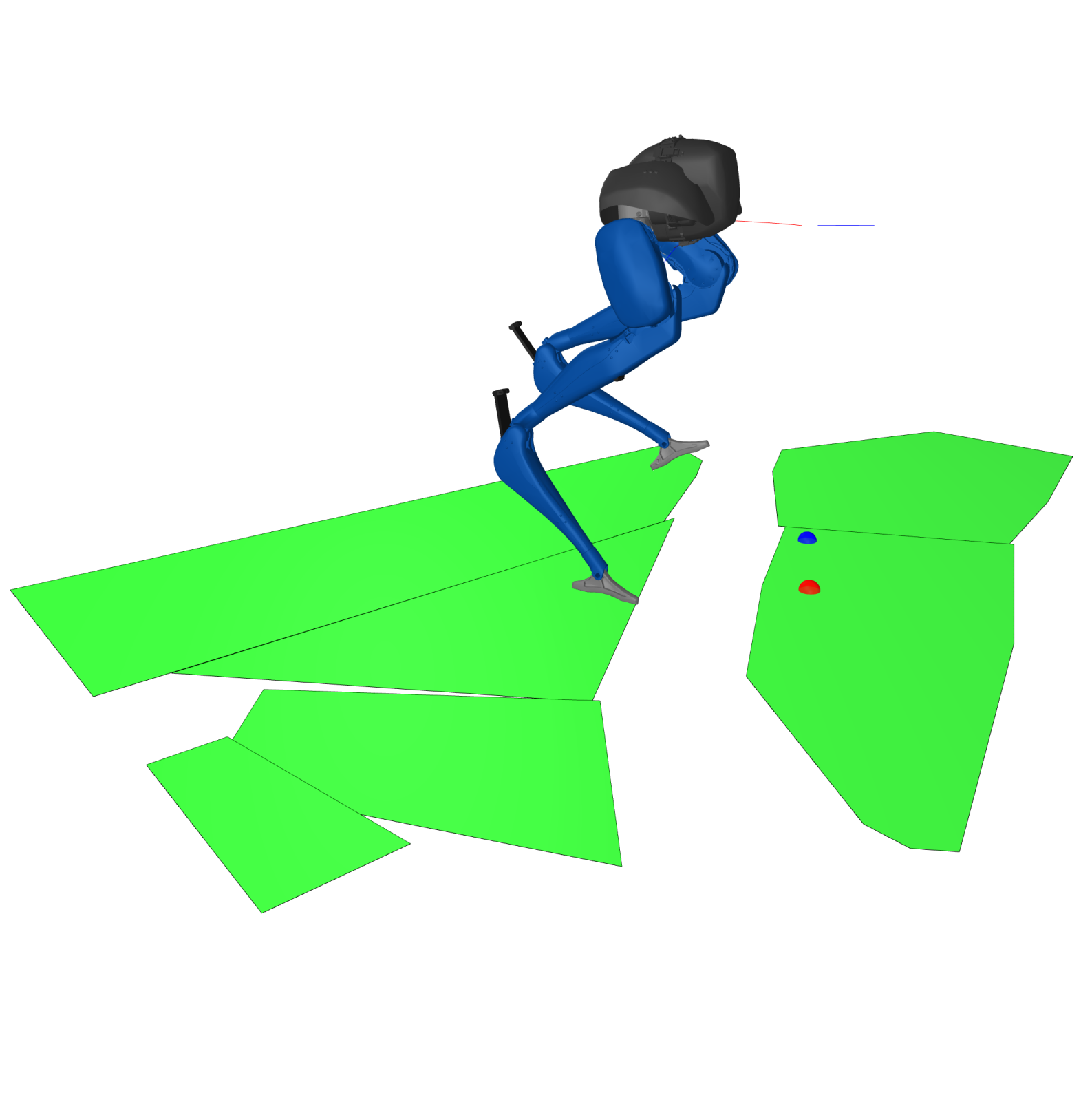
Learning a Vision-Based Footstep Planner for Hierarchical Walking Control
By Minku Kim, Brian Acosta, Pratik Chaudhari and Michael Posa. In 2025 IEEE-RAS International Conference on Humanoid Robots